
Qhov kev co ntawmcov hlau nplaum tas mus li synchronous motorsfeem ntau yog los ntawm peb yam: suab nrov aerodynamic, kev co tshuab, thiab kev co electromagnetic. Suab nrov aerodynamic yog tshwm sim los ntawm kev hloov pauv sai ntawm lub zog cua hauv lub cev muaj zog thiab kev sib txhuam ntawm cov roj thiab cov qauv ntawm lub cev muaj zog. Kev co tshuab yog tshwm sim los ntawm kev hloov pauv elastic ntawm cov bearings, cov teeb meem geometric, thiab kev tsis sib npaug ntawm rotor ncej. Kev co electromagnetic yog tshwm sim los ntawm kev ua kom muaj electromagnetic, thiab lub zog sib nqus cua ua rau lub hauv paus stator, ua rau muaj kev hloov pauv radial ntawm stator, uas xa mus rau lub cev muaj zog thiab xa suab nrov. Txawm hais tias qhov sib xyaw tangential ntawm lub zog sib nqus cua me me, nws tuaj yeem ua rau cogging torque ripple thiab kev co lub cev muaj zog. Hauv kev tsav tsheb ntawmcov hlau nplaum tas mus li synchronous motors, electromagnetic excitation yog qhov tseem ceeb ntawm kev co.
Nyob rau theem pib tsim ntawmcov hlau nplaum tas mus li synchronous motors, los ntawm kev tsim kom muaj tus qauv teb kev co, tshuaj xyuas cov khoom ntawm kev ua kom muaj zog electromagnetic thiab cov yam ntxwv dynamic ntawm cov qauv, kwv yees thiab soj ntsuam qib ntawm kev co suab nrov, thiab optimizing tus qauv tsim rau kev co, kev co suab nrov tuaj yeem txo qis, kev ua haujlwm ntawm lub cev muaj zog tuaj yeem txhim kho, thiab lub voj voog kev loj hlob tuaj yeem luv dua.
Kev nce qib ntawm kev tshawb fawb tam sim no tuaj yeem muab faib ua peb ntu:
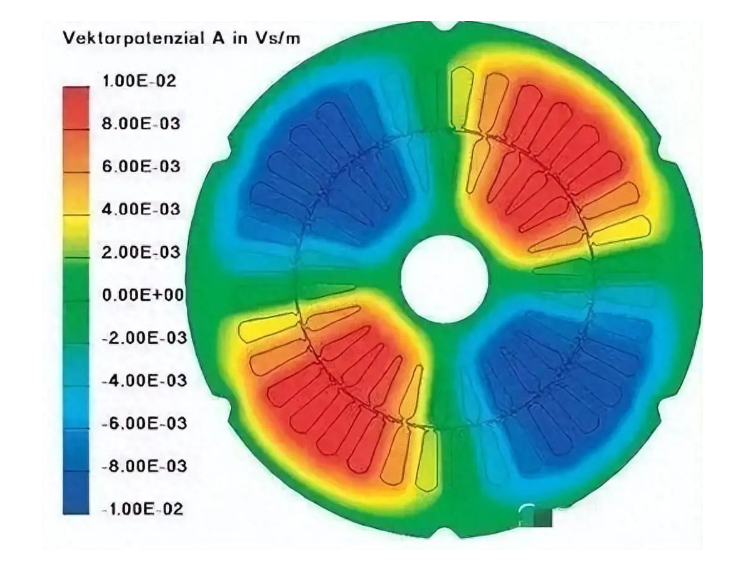
1. Kev tshawb fawb txog kev ua kom muaj hluav taws xob ntau: Kev ua kom muaj hluav taws xob ntau yog qhov ua rau muaj kev co, thiab kev tshawb fawb tau ua mus ntau xyoo. Kev tshawb fawb thaum ntxov suav nrog kev xam qhov faib ntawm cov zog hluav taws xob hauv cov cav thiab tau txais cov qauv tshuaj xyuas rau cov zog radial. Nyob rau hauv xyoo tas los no, cov txheej txheem simulation finite element thiab kev tshuaj xyuas lej tau siv dav, thiab cov kws tshawb fawb hauv tsev thiab txawv teb chaws tau kawm txog kev cuam tshuam ntawm cov qauv sib txawv ntawm qhov chaw ntawm lub zog cogging ntawm cov cav sib nqus tas mus li.
2. Kev tshawb fawb txog cov yam ntxwv ntawm cov qauv: Cov yam ntxwv ntawm cov qauv muaj feem cuam tshuam nrog nws cov lus teb vibration, tshwj xeeb tshaj yog thaum lub zaus excitation ze rau lub zaus ntuj ntawm cov qauv, resonance yuav tshwm sim. Cov kws tshawb fawb hauv tsev thiab txawv teb chaws tau kawm txog cov yam ntxwv ntawm cov qauv ntawm lub cev muaj zog stator los ntawm kev sim thiab kev sim, suav nrog cov yam ntxwv uas cuam tshuam rau cov zaus modal xws li cov ntaub ntawv, elastic modulus, thiab cov qauv tsis.
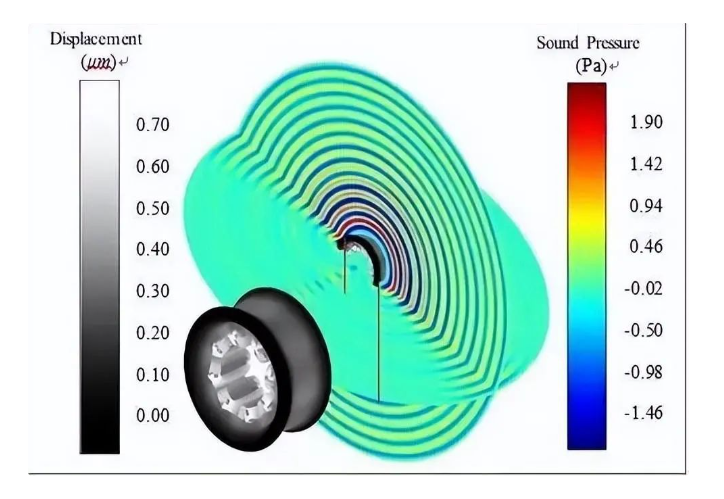
3. Kev Tshawb Fawb Txog Kev Teb Rov Qab Los Ntawm Kev Siv Hluav Taws Xob Los Ntawm Hluav Taws Xob: Kev teb rov qab los ntawm lub cev muaj zog yog los ntawm kev ua kom lub zog hluav taws xob ua rau ntawm cov hniav stator. Cov kws tshawb fawb tau tshuaj xyuas qhov kev faib tawm ntawm lub zog hluav taws xob, thauj cov kev ua kom lub zog hluav taws xob mus rau ntawm lub cev muaj zog stator, thiab tau txais kev suav lej thiab cov txiaj ntsig ntawm kev sim ntawm kev teb rov qab los ntawm kev co. Cov kws tshawb fawb kuj tau tshawb xyuas qhov cuam tshuam ntawm cov coefficient damping ntawm cov khoom siv plhaub rau kev teb rov qab los ntawm kev co.
Lub sijhawm tshaj tawm: Lub Peb Hlis-06-2024


